Links relacionados:
Laboratório: veja um vídeo de uma aula prática de robótica (237 MB)
Classificação segundo a autonomia do sistema de controle
Classificação segundo a mobilidade da base
|
|
Robô móvel humanoide |
Robô móvel com rodas |
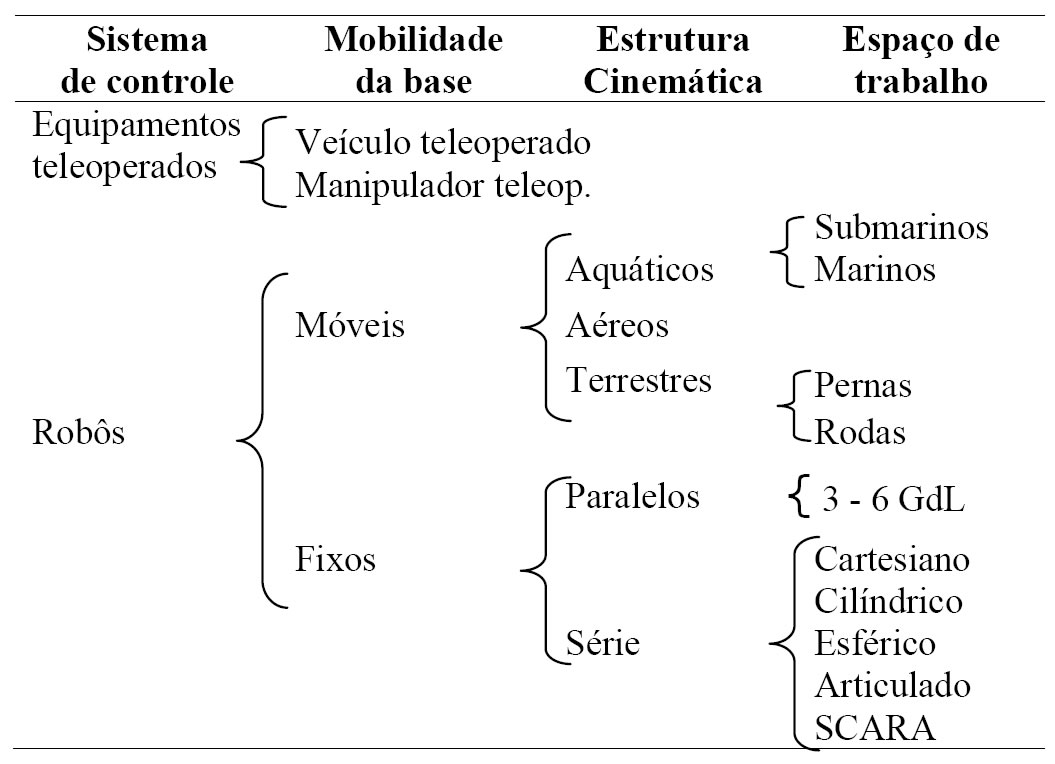
Classificação segundo a estrutura cinemática
|
|
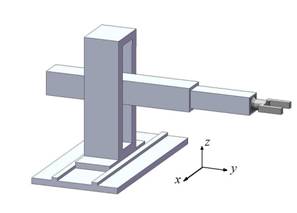
Estrutura de um robô cartesiano |
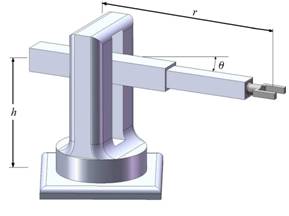
Estrutura de um robô cilíndrico |
|
|
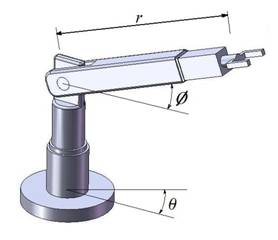
Estrutura de um robô esférico |
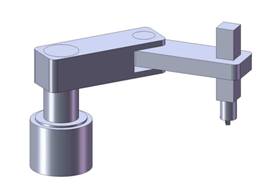
Estrutura de um robô articulado |
Robôs Paralelos:
Robôs paralelos de 3 GdL (Graus de Liberdade), tais como Delta (por ex.: ABB IRB 340), Tricept (por ex., ABB IRB 940, Comau HP1) e orthoglide.
|
|
|
Delta |
Tricept |
Orthoglide |
Robô paralelo de 4 GdL, por ex.: Adept Quattro.

Robô paralelo de 5 GdL.
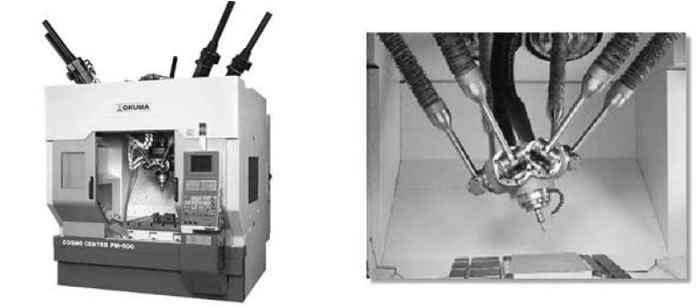
Robôs paralelos de 6 GdL
|
|
Plataforma Steward (1965) |
Plataforma Gough (1956) |
veja o vídeo de um simulador de Plataforma Steward em operação (1Mb)
Classificação segundo o número de graus de liberdade
Premissa: para posicionar uma ferramenta no espaço são necessários 6 GdL, isto é, três coordenadas no espaço para definir a posição e mais três ângulos de rotação para definir a orientação; entende-se então que são necessários robôs com 6 GdL para atingir qualquer posição e orientação.
Classificação segundo o tipo de acionamento
Características de motores eletricos para servo-sistemas.
| Motor | Pot. | ω máx. | Faixa de ω | Torque/vol. | η % |
custo | controle |
manut. |
|
| cap. | custo | ||||||||
| CC – comutado | Baixa | Média | Alta | Médio | Média | Baixo | alto | Baixo | Alto |
| CC – brushless | M/B | Alta | Média | Alto | Alta | Médio | Médio | Médio | Baixo |
| CA – gaiola | M/A | Média | M/B | Médio | Média | Baixo | Médio | Alto | Baixo |
| CA – relutância | M/B | Alta | M/A | Médio | Baixa | Baixo | Médio | Médio | Baixo |
| CA – imã perman. | M/B | Média | Alta | Alto | Alta | Alto | Alto | Médio | Baixo |
| De passo | Baixa | Baixa | – | Alto | – | Alto | Alto | Baixo | Baixo |